library(deSolve)R for modellers - Vignette 10
Solving ODE in R
Julien Arino


Department of Mathematics
University of Manitoba*
* The University of Manitoba campuses are located on original lands of Anishinaabeg, Cree, Oji-Cree, Dakota and Dene peoples, and on the homeland of the Métis Nation.
The deSolve library
- As already pointed out,
deSolve:
The functions provide an interface to the FORTRAN functions ‘lsoda’, ‘lsodar’, ‘lsode’, ‘lsodes’ of the ‘ODEPACK’ collection, to the FORTRAN functions ‘dvode’, ‘zvode’ and ‘daspk’ and a C-implementation of solvers of the ‘Runge-Kutta’ family with fixed or variable time steps
- You are benefiting from years and years of experience: ODEPACK is a set of Fortran (77!) solvers developed at Lawrence Livermore National Laboratory (LLNL) starting in the late 70s
- Other good solvers written in
Care also included
- Refer to the package help for details
Using deSolve for simple ODEs
As with most numerical solvers, you need to write a function returning the value of the right hand side of your equation (the vector field) at a given point in phase space, then call this function from the solver
First, we load the library
The required ingredients
- A function describing the right hand side of the differential equation
- Initial conditions
- Times at which to return the value of the solution
- (Optional) Parameters
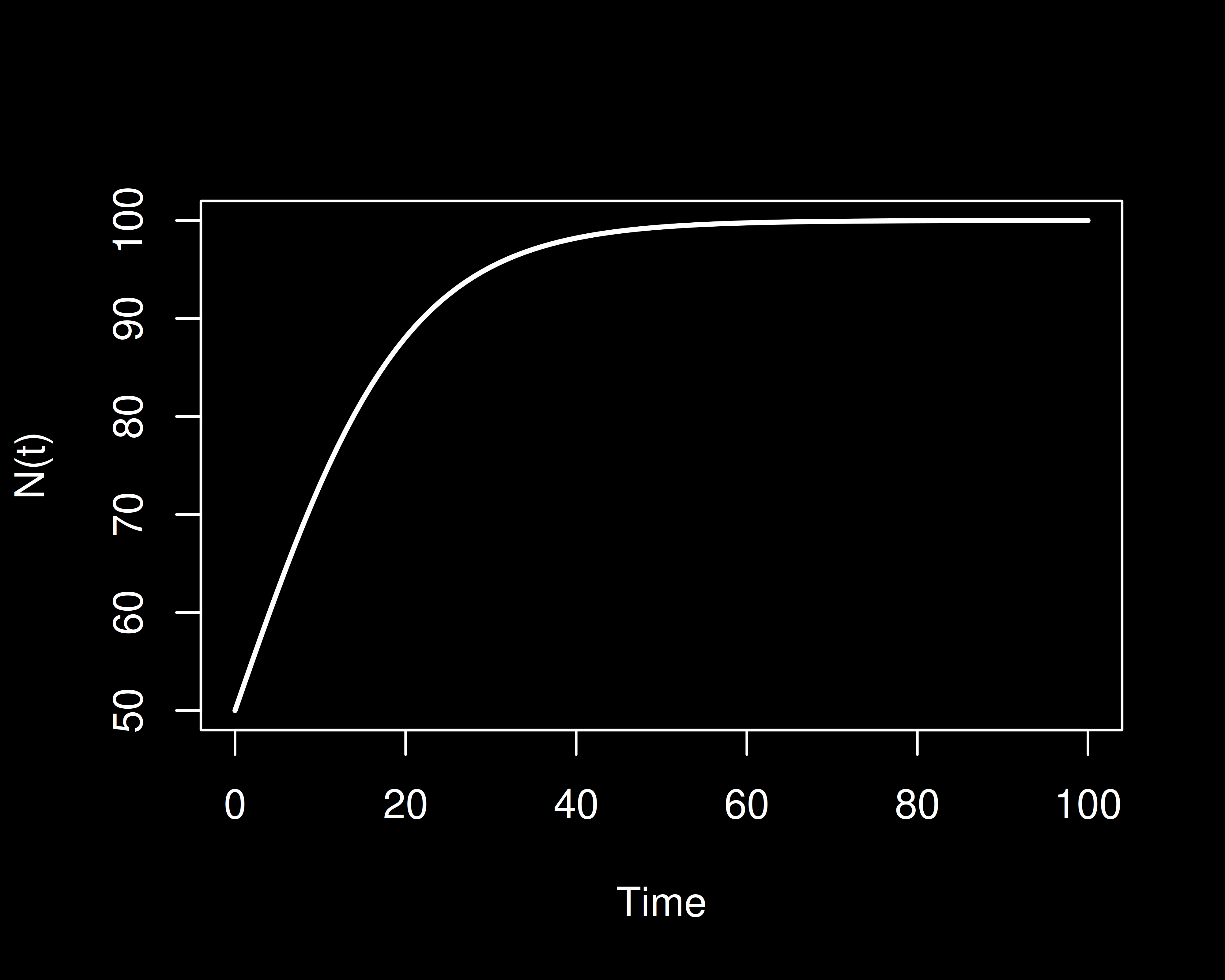
Example - the logistic ODE
The logistic ODE
\[ \frac{d}{dt}N(t)= rN(t)\left(1-\frac{N(t)}{K}\right) \] or, omitting time dependence \[ N' = rN\left(1-\frac NK\right) \]
- \(r\) growth rate
- \(K\) carrying capacity
- \(N(0)\geq 0\) initial condition
IC / times / parameters
ICis a named vectortimesis a vector of times at which the solution is returned (not necessarily where it is computed, can be different from this)paramsis a list
The right hand side function (v1)
The right hand side function (v2)
The right hand side function (v3)
In this case, beware of not having a variable and a parameter with the same name..
Just to clarify:
and using with(as.list(c())) makes these values available to the function with just the names (hence we do not need p$r, for instance)
Finally, call the solver
Just to make sure results are the same
What a solution looks like
Plot the result
Changing integration parameters
Default method: lsoda
lsodaswitches automatically between stiff and nonstiff methodsYou can also specify other methods: “lsode”, “lsodes”, “lsodar”, “vode”, “daspk”, “euler”, “rk4”, “ode23”, “ode45”, “radau”, “bdf”, “bdf_d”, “adams”, “impAdams” or “impAdams_d” ,“iteration” (the latter for discrete-time systems)
- You can implement your own integration method